1. 들어가며
지난 10월에 싱가포르에서 열린 ROSCon 2025에 ML2의 이채혁님과 윤세현님이 다녀왔습니다! 지난 CoRL에 참가에 이어 로보틱스에서 가장 큰 개발자 컨퍼런스에 다녀올 기회를 제공해준 팀과 회사에 감사드립니다. 이번 참가에서 얻고자 했던 것은 크게 세가지였습니다. 1. 저희가 기여하고 있는 open source project의 메인테이너와 만나서 논의하기, 2. Open-RMF 프로젝트가 어떠한 것이고, 실제로 어떻게 활용하는지 파악하기, 3. 학계가 아닌 실제로 로봇을 운영하는 개발자들 사이에서의 화두는 무엇인지 알아보고자 출장을 다녀왔습니다.
공식 통계로 이번 ROSCon에는 950여명이 참석했다고 합니다. 7000명이 넘는 ICRA와 같은 학회와 비교하면 작은 숫자이지만, 그만큼 더 밀도 있는 네트워킹이 가능했고 참석자들의 열정은 다른 큰 학회들 못지 않았습니다.

컨벤션 센터 입구에 아주 크게 ROSCon 로고가 떠 있었습니다.
2. Academic conference와의 차이
ICRA나 CoRL과 같은 로봇 관련 학술대회는 몇 번 다녀왔지만, ROSCon과 같은 개발자 컨퍼런스는 처음이라 어떻게 다를지 개인적으로도 궁금했습니다. 가장 큰 차이를 느낀 것은 컨퍼런스에서 화두가 되는 주제 들이었습니다.
ICRA나 IROS와 같은 학술 학회에서의 화두를 꼽자면, 몇 년 전부터 당연히 인공지능(AI)였습니다. 그래서 가장 많이 논의되던 주제 역시 AI를 어떻게 써서 새로운 결과를 얻어냈느냐, 혹은 AI를 위한 데이터셋을 어떻게 얻을 것인가가 가장 주요한 주제가 되어왔습니다. 그런데 이번 ROSCon에서는 AI가 대한 이야기가 놀라울 정도로 적었습니다. 아예 없었던 것은 아닙니다만, 실제로 의미 있는 발표는 Boston Dynamics, RAI의 발표 정도였고, 그 외의 2~3개의 AI 관련 발표는 앞으로의 계획에 더 가까운 발표였습니다. 수치로 말하면 전체 발표와 논의 주제 중 20% 이하였습니다. 최근 로보틱스와 관련된 밋업이나 컨퍼런스 중 이 정도로 AI에 대한 논의가 적었던 곳은 처음이었습니다. 실제로 로봇을 배치하고 운용하고 있는 개발자들에게는 AI는 아직 우선순위가 아니라는 인상을 강하게 받았습니다.

AI 관련 발표 중 개인적으로 유일하게 의미있었던 RAI의 발표.
당장 실용성에 의문이 있는 AI보다는, 로봇 개발자들은 현장의 로봇이 당장 안정적으로 운용되는 것이 더 중요했습니다. 특히 학계에서는 거의 다루지 않는 네트워크 안정성에 대한 이야기가 많이 나온 것이 신기했습니다. 기존 ROS2의 네트워크 미들웨어로 활용되던 DDS는 산업에서 꽤 오랜 시간 검증되고 안정화된 기술임에도 불구하고, 로봇 환경에서의 적용에는 한계가 있다는 의견을 많이 들을 수 있었습니다. 특히 멀티 로봇 환경이나 빠른 속도의 제어가 필요한 환경에서의 이슈가 많았고, 이러한 문제들을 해결하기 위해서 Zenoh라는 새로운 미들웨어를 도입하려고 하고 있었습니다. Zenoh는 이미 올해 ROS2 배포판부터는 Tier 1로 관리된다고 하고, 차차 DDS를 대체하는 디폴트 미들웨어가 되지 않을까 예측하는 의견이 많았습니다.

두산로보틱스의 Zenoh 활용에 대한 발표. Zenoh의 효과를 한 눈에 알기 쉬운 좋은 발표였습니다.
멀티 로봇에 대한 논의가 많은 것도 흥미로웠습니다. 여러 대의 로봇을 동시에 운용하는 멀티 로봇 분야는 흥미로운 분야지만, 학계에서는 다소 마이너한 주제에 속합니다. 하지만 실제 현장에서는 로봇 한 대는 의미가 없고, 거의 대부분의 환경에서 다수의 로봇을 동시에 운용해야 합니다. 공항이나 병원 같이 넓은 공간에서 한대의 로봇이 배달을 처리하고 오는 동안 다른 고객이 기다리게 할 수는 없으니까요. 그래서 멀티 로봇을 운영하기 위한 프레임워크(Open-RMF)와, 효율적인 운용 방안에 대한 논의가 정말 많았습니다. (Open-RMF는 저희가 이번에 제대로 파악해보고자 한 프레임워크이기도 합니다.) 실제 활용 예는 어떠한지, 어떠한 한계가 있는지 직접 들어보고 써본 사람들의 의견도 들어볼 수 있었습니다. 또 공항 적용 시의 사람이 붐비는 체크인 시간을 피한다던지, 병원이나 호텔에서 적용 시 엘리베이터, 자동문과 같은 기존 인프라와 어떻게 연동하는지에 대한 경험도 들어볼 수 있었습니다. 이러한 문제들은 모두 실환경 적용에서 맞닥트렸던 문제들로 실제 적용 기회가 적은 저희 연구팀에게는 매우 소중한 지식이 되었습니다.

Open-RMF에 대한 발표
하나 인상에 남았던 것은 싱가포르 정부에서 이러한 멀티 로봇의 도입을 강력하게 추진한다는 것입니다. 대부분의 국가 연구 과제는 개발되더라도 잘 활용되지 않는데 반해, 싱가포르에서는 정부가 나서서 개발된 로봇을 공항이나 병원에 실제로 배치하는 느낌이었습니다. 그리고 배치된 로봇들은 단순히 보여주기가 아니라, 실제로 원하는 목적에 따라 운용되는 것을 공항에서 직접 확인할 수 있었습니다. 단순히 보여주기가 아니라 실제로 활용되는 경우에 기술력이 급격히 향상되는데, 싱가포르에서는 이것을 정부가 제대로 주도하고 있었습니다. 이러한 로봇 도입이 우리나라에서도 더 강력하게 추진되면 좋을 것 같다고 느꼈습니다. (정부가 주도한다고 추측한 것은 싱가포르 체제 상 정부가 아니면 이걸 강력히 추진하기 어렵기 때문입니다.)
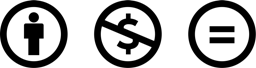
실제 싱가포르 창이 공항에 배치된 Open-RMF를 활용한 청소 로봇
또 하나 학술 대회와 다른 점은 발표의 무게감이 여러모로 가벼웠다는 것입니다. 학술 대회에서 발표되는 연구들은 모두 과학적인 검증을 기반으로 해야 하므로, 반드시 정량적인 결과와 함께 이전 방법보다 나았다는 것을 증명해야 했습니다. 과학적인 검증 방법이나 방법의 독창성에 대한 매우 엄격한 평가가 이루어지기 때문에, 발표하는 사람과 듣는 사람 모두 진지한 분위기가 강합니다. 하지만 대부분의 연구들의 퀄리티가 높은 수준으로 보장됩니다. 하지만 개발자 컨퍼런스인 ROSCon은 훨씬 가볍고 편한 느낌이었습니다. 정량적인 결과보다는 실제 현장에서 잘 되는 것을 보여주는 “데모”가 중요했습니다. 반대로 솔직히 말해 발표 퀄리티는 좀 더 변동이 큰 편이었습니다. 하지만 많은 사람들이 좀 더 쉽게 자신의 의견을 내고 소통할 수 있다는 장점이 있었습니다.

미팅룸 전경. 여기서 대부분의 네트워킹과 논의가 이루어졌습니다.
3. Nav2 maintainer와의 대화
이번 출장의 또 다른 목표 중 하나는 ROS 2 Nav2 패키지의 메인테이너인 Steve Macenski와 미팅을 갖는 것이었습니다. 저희 팀에서는 그가 관리하는 slam_toolbox 패키지에 지금까지 작은 PR들을 해왔고, 이번에 저희가 연구하고 있는 내용들을 Nav2패키지에 PR할 계획을 갖고 있습니다. 이번 기회에 그를 직접 만나서 저희의 연구 프로젝트에 대해 좀 더 자세히 설명하고, 이를 Nav2에 포함하는 것에 대한 그의 생각도 듣고 싶었습니다.
결론적으로, 그는 semantic 정보들을 더 적극적으로 추가하고자 하는 저희의 방향에 대부분 동의해주었습니다. Semantic 정보들 중 어떤 정보들을 더 우선시할 것인지 등에 대한 의견 차이도 약간 있었지만 금방 좁힐 수 있었고, 무엇보다 직접 만나지 않으면 이런 세세한 얘기까지는 나누지 못했을 것입니다. 이미 많은 미팅이 있었음에도 흔쾌히 저희와 따로 시간을 내어주었고, 그의 회사에 대한 소식도 몇 가지 들을 수 있었습니다.
그가 이 오픈소스 내비게이션 프로젝트들의 개발을 삼성 리서치에서 어떻게 시작했고, 어떻게 독립하게 되었는지에 대한 대화도 짤막하게 나눴습니다. 혼자서 시작한 사내 프로젝트가 어떻게 가장 많이 활용되는 ROS 프로젝트 중 하나가 되었는지에 대한 역사를 들어볼 수 있었습니다. 삼성에서 겪었던 한국 회사 특유의 이런저런 문제들을 얘기하면서도, 삼성 덕분에 이 개발을 시작할 수 있었고 그에 대해 여전히 감사한다고 하는 이야기를 들었습니다.
4. 마치며
이번 ROSCon 방문은 여러모로 신선한 경험이었습니다. 현장에서 바라보는 시각과 연구에서 바라보는 시각이 생각보다 크게 다르다는 점을 직접 느낄 수 있었고, 무엇보다 개발자 특유의 편안한 분위기 속에서 자유롭게 논의할 수 있다는 점이 인상적이었습니다.
이미 ROS 생태계에 큰 기여를 해온 개발자분들을 만나면 꼭 한 가지 질문을 드리곤 했습니다. 어떻게 로봇 개발을 시작하게 되었고, 어떻게 이렇게 큰 규모의 패키지까지 발전시킬 수 있었는지에 대한 이야기였습니다. 사실 저는 “재미있어서 시작했고 지금도 재미있어서 계속한다”는 답을 예상했었지만, 의외로 대부분은 재미에 대한 언급을 거의 하지 않았습니다. 많은 분들이 우연한 기회로 로봇 개발을 시작했고, 계속하다 보니 자연스럽게 다른 사람들이 사용하기 시작하면서 기여할 여지가 커졌고, 그 과정이 좋아서 개발을 이어가고 있다고 말했습니다. 결국 커뮤니티에 기여할 수 있다는 점 자체가 가장 오래 지속되는 동력이 된다는 사실을 다시 한번 느낄 수 있었습니다.
아, 그리고 다음 ROSCon 2026은 캐나다 토론토에서 열린다고 합니다. 너무 멀긴 하지만 기회가 된다면 또 가보고 싶습니다.